Icom CI-V stepper
This revision is from 2019/05/12 22:27. You can Restore it.
Icom CI-V stepper allows tuning with stepper motor Nema 17 some devices dependancy to Icom frequency
Quick start guide
- Connect hardware (Stepper, Endstop switch, Power Supply, TX inhibit output, CAT)
- Configure over USB CLI
Hardware
Connect
Endstop
Stepper
BCD input
CAT
TX Inhibit output
Power supply
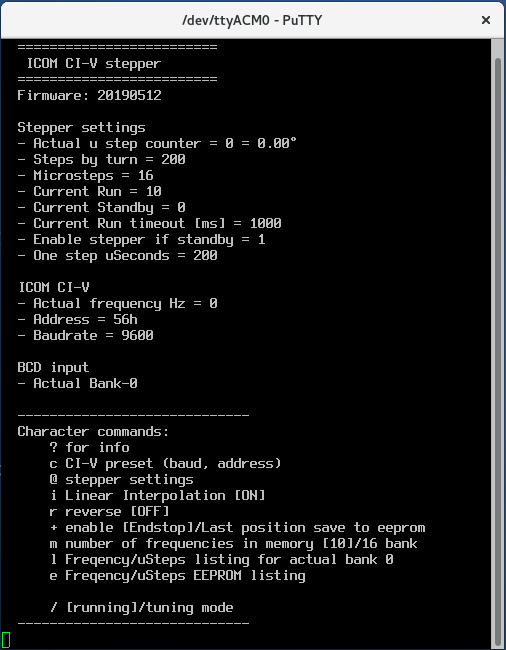
USB Command Line Interface (CLI)
- connect USB micro cable between CLI stepper and your PC
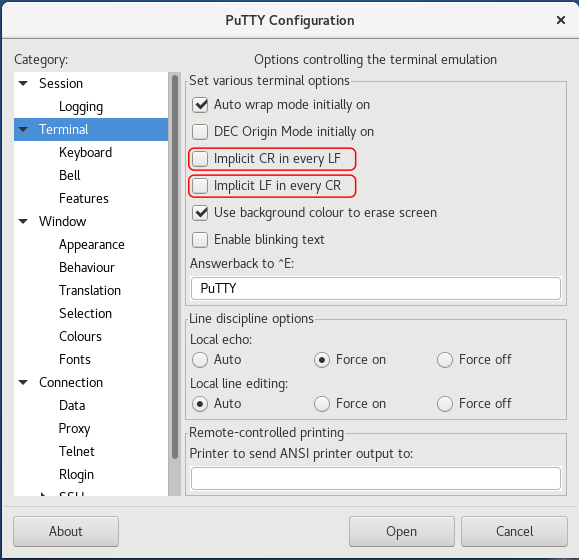
- install PuTTY terminal
- after run it set
- com port dependency to your system
- baudrate to 115200
- Connection type to Serial
- In Terminal category turn off options Implicit CR and Implicit LF by picture
Firmware
For upload firmware you have two possibilities
- Download source from GitHub and compile in Arduino IDE
- Install EEPROM library
- Download compiled binary from release page and upload with some tool
Firmware source
contains some settings which does not available from CLI
- You can enter frequency and uStep directly in to firmware without CLI wizard. How to
- Disable preset coment line
//#define RestoreMemoryFromEeprom
- Write frequency and uSteps i to array
unsigned long StorageFreqToStep[112][2] = { {7000000, 0}, {7010000, 500}, {7020000, 1000}, {7030000, 1500}, {7040000, 2000}, .. - Upload firmware
- Select BCD input to bank-0 (must be, because only bank-0 saved also frequency, higest bank saved uStep only)
- Save frequency/uStep table from RAM to EEPROM with command s in CLI
- Replay edit table, upload and save for any higher bank
- After fill EEPROM to your liking, enable command in source file
#define RestoreMemoryFromEeprom
- After upload frequency/uStep table will be set by preset selected bank. For more info use command l or e in CLI.
- Time (second number in ms) after which reduce stepper current and save last position to eeprom, if disable endstop
long CurrentRunTimeout[2] = {0,1000}; - Enable serial debug if uncoment this line
#define SERIAL_debug
- CLI baudrate, default is 115200
const int BAUDRATE0 = 115200;