Remote multi rotator control
This revision is from 2014/08/27 22:17. You can Restore it.

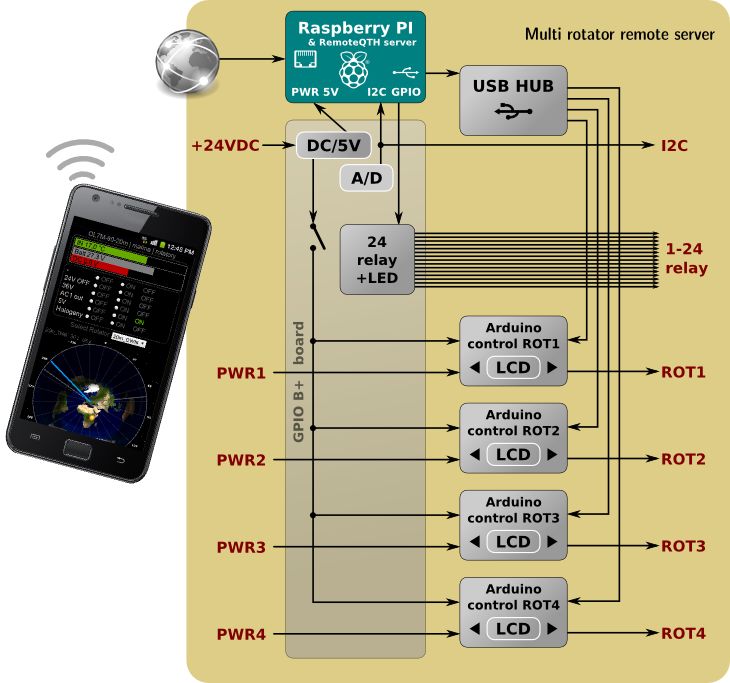
- Block diagram
- Rack case
- Rotators module
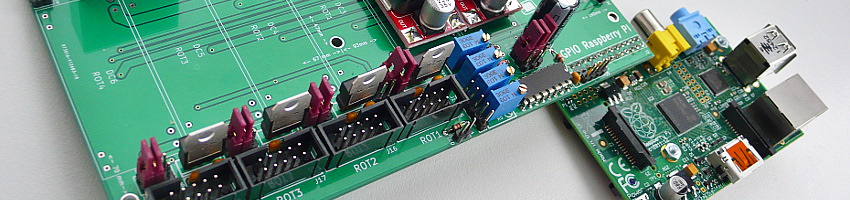
- GPIO board for model B2+
- GPIO board for model B
- How to assemble components to complete server
- software Configuration
Block diagram
Rotators module

How to assemble components to complete server

software Configuration
- configure from master tree Arduino firmware by K3NG, or download preconfigured version
- 2014-07-08.zip
- 2013-10-26.zip
- Change the Baud rate to 9600 (at K3NG source code its 115.k baud the preset)
#define SERIAL_BAUD_RATE 9600
- install RemoteQTH server on SD card for Raspberry PI
- login (yourcall/1234)to web interface and update server from status page
- change login and password in menu SETTINGS/LOGIN
- in menu SETTINGS/WEB RELAY change name for first relay to POWER and others set to n/a
- in menu SETTINGS/ROTATORS set number on Four and configure each rotator
- set Name
- replug usb and find ID from pop-up window
- From/To azimuth without overlap
- Get/Set sommand by defaukt
- Your locator and apply
- For detection USB interface replug all interface by turning power off from the menu CONTROL/SWITCH RELAY - Recognized USB devices shown in STATUS page as rot1 , rot2, rot3 and rot4